Status Update
We were quite busy last few weeks. Our first priority was to make sure all rovers are operational. Motor swaps, new wheels, and other minor repairs where needed since last PiWars. And now - all three are updated to the latest spec and even upgraded. Last rover got MPU9250 9 axis gyro/accelerometer/compass breakout board and all got extra pin provided at our 'i2c' bus. Now not only we have GND, VCC (3.3V), SDA and SCL on the cable for attachments, but extra GPIO - GPIO 4 which, in theory, can dub as One Wire Interface, too. Currently that pins purpose is to select between two VL53L0X sensors.
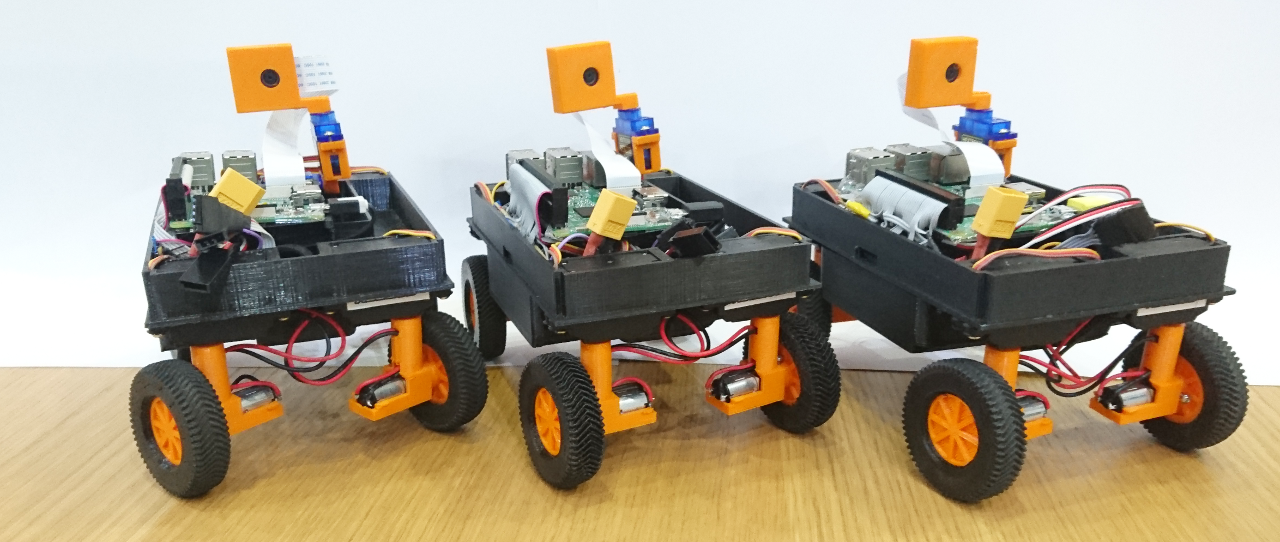 Aside of making rovers up and running, we, as you have seen in previous blogs, have undergone another major change - switched from WiFi/TCP/MTQQ communication with the rover to Bluetooth directly to the rover. Now two rovers can be controlled remotely (previously we would be using a computer with wired game controller) - one with old style MQTT communication and another with PS3 game controller. That allowed us to start practising where we lost in final of one of the challenges: PiNoon.
Aside of making rovers up and running, we, as you have seen in previous blogs, have undergone another major change - switched from WiFi/TCP/MTQQ communication with the rover to Bluetooth directly to the rover. Now two rovers can be controlled remotely (previously we would be using a computer with wired game controller) - one with old style MQTT communication and another with PS3 game controller. That allowed us to start practising where we lost in final of one of the challenges: PiNoon.

We undertook that task quite seriously:
Aside of having fun bursting each other balloons we had quite a serious task designing new (and secret) controls and special moves:

Also we did quite a lot on 'behind the scenes' software regarding controllers. See here https://gccpiwars.wordpress.com/2018/02/10/our-controllers-and-why-indentation-is-important/.
In parallel to it, we are exploring ability to use ultrasonic sensors HC SR04HC SR04 as they are much faster to measure distances than VL53L0X and theoretically equally precise. Our original idea was that Raspberry Pi would be sufficient to trigger the sensor and measure time of response, but with multi-tasking non real-time operating system it turned out to be quite messy operation.

Because of that we started working on Arduino/ATmega328p solution where it should act as slave i2c device which will use 16-bit timer (Timer1) to measure time from trigger signal to echo. Current status update is that using Arduino Wire library for i2c and sensor library for reading ultrasonic sensor doesn't work quite well due to interrupt clashing, but some of the following blog posts are going to explore it in depth and, hopefully, announce solution.
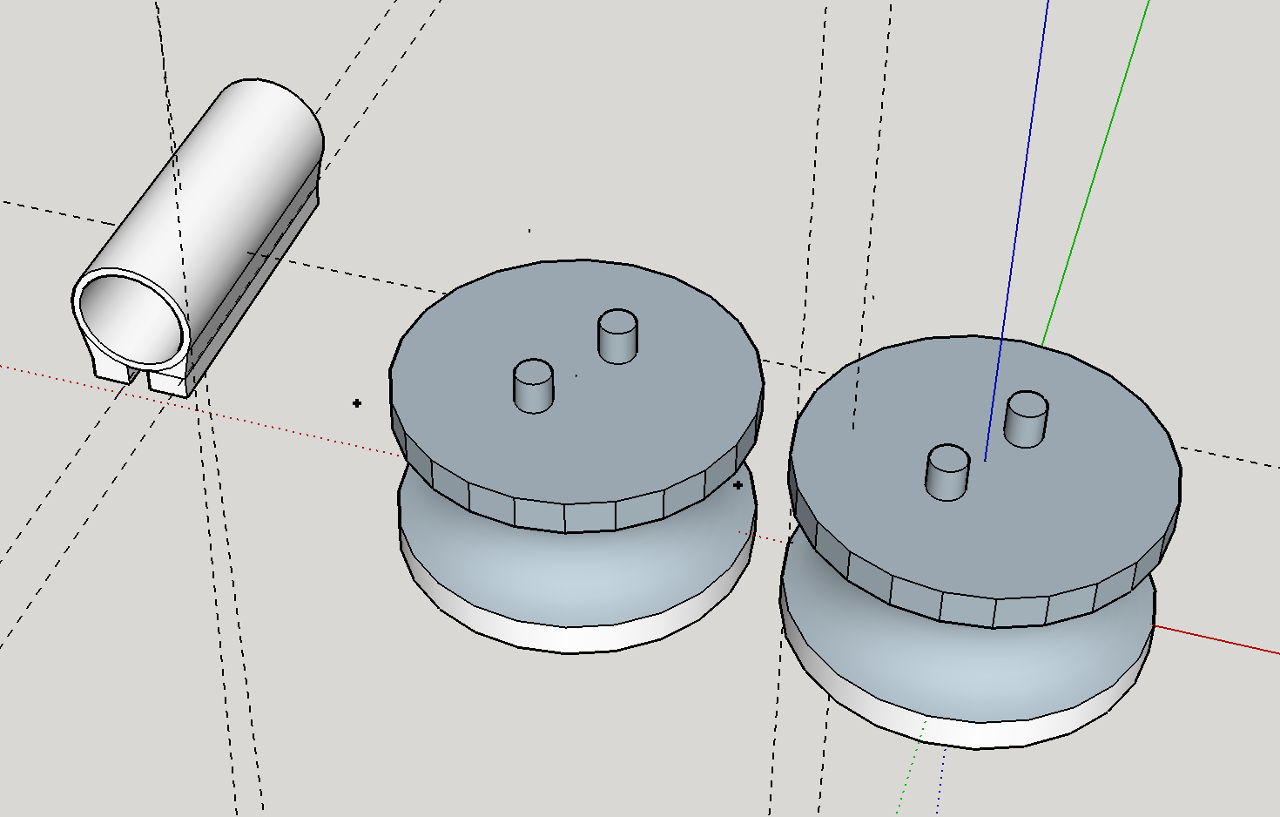
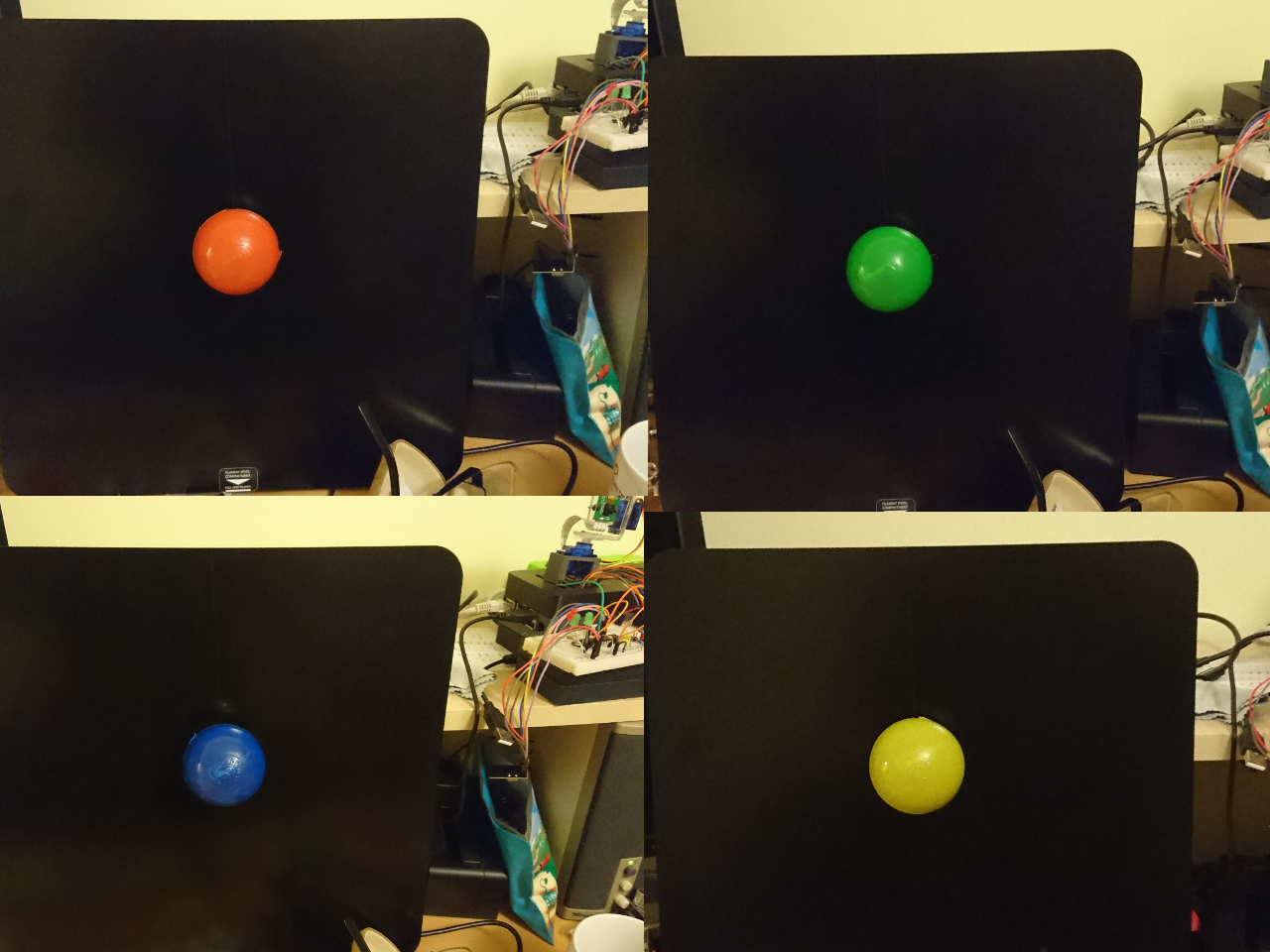
Aside of that, we have started working on nerf gun (ground up solution) and recognising coloured balls for the Somewhere Over The Rainbow challenge.
More updates next time...
Comments
Comments powered by Disqus