YIn The Meantime
Before we go elbow deep in mechanical design, electronics and programming - our existing rovers needed some sprucing up. All needed to be brought to the same specs and some previous design decision revisited.
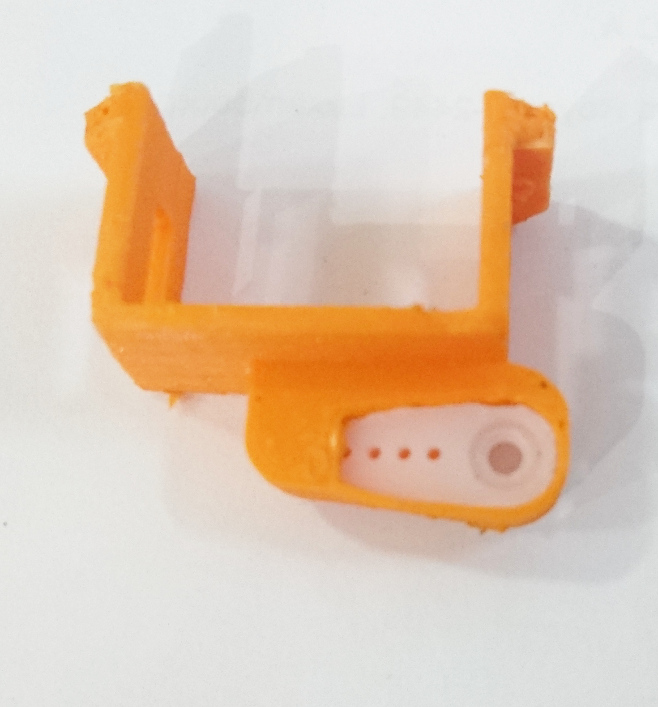
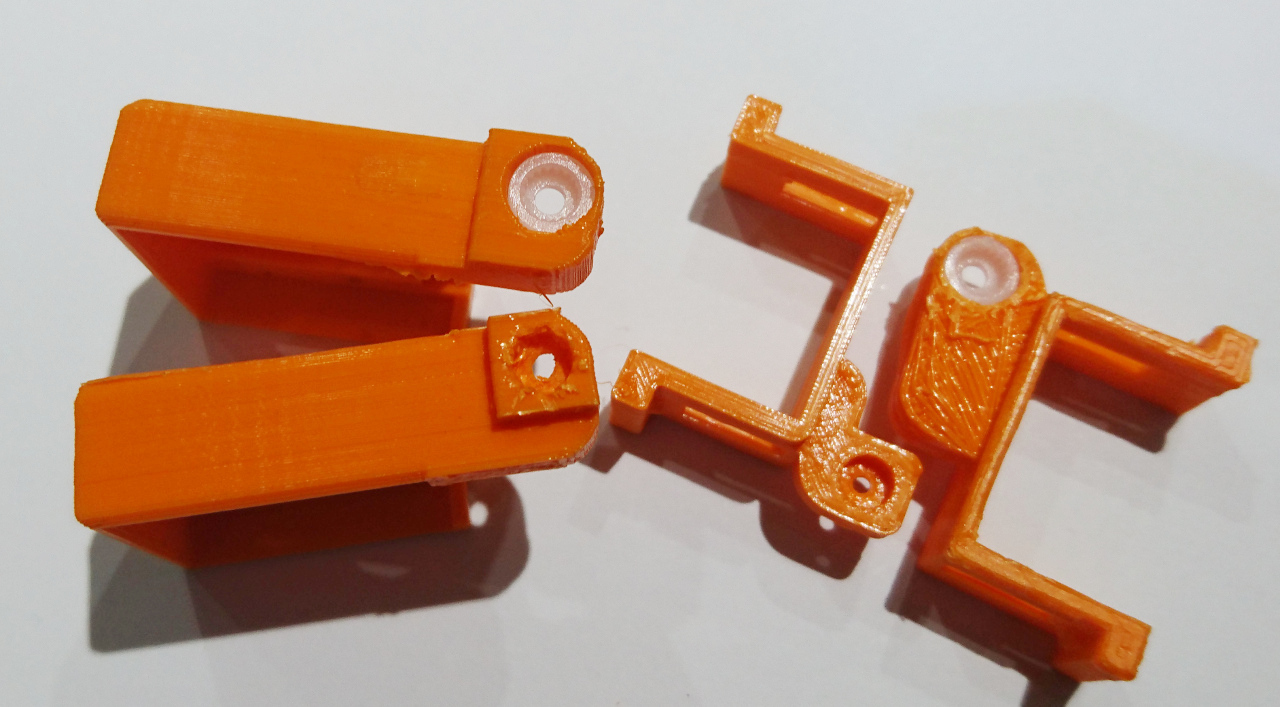
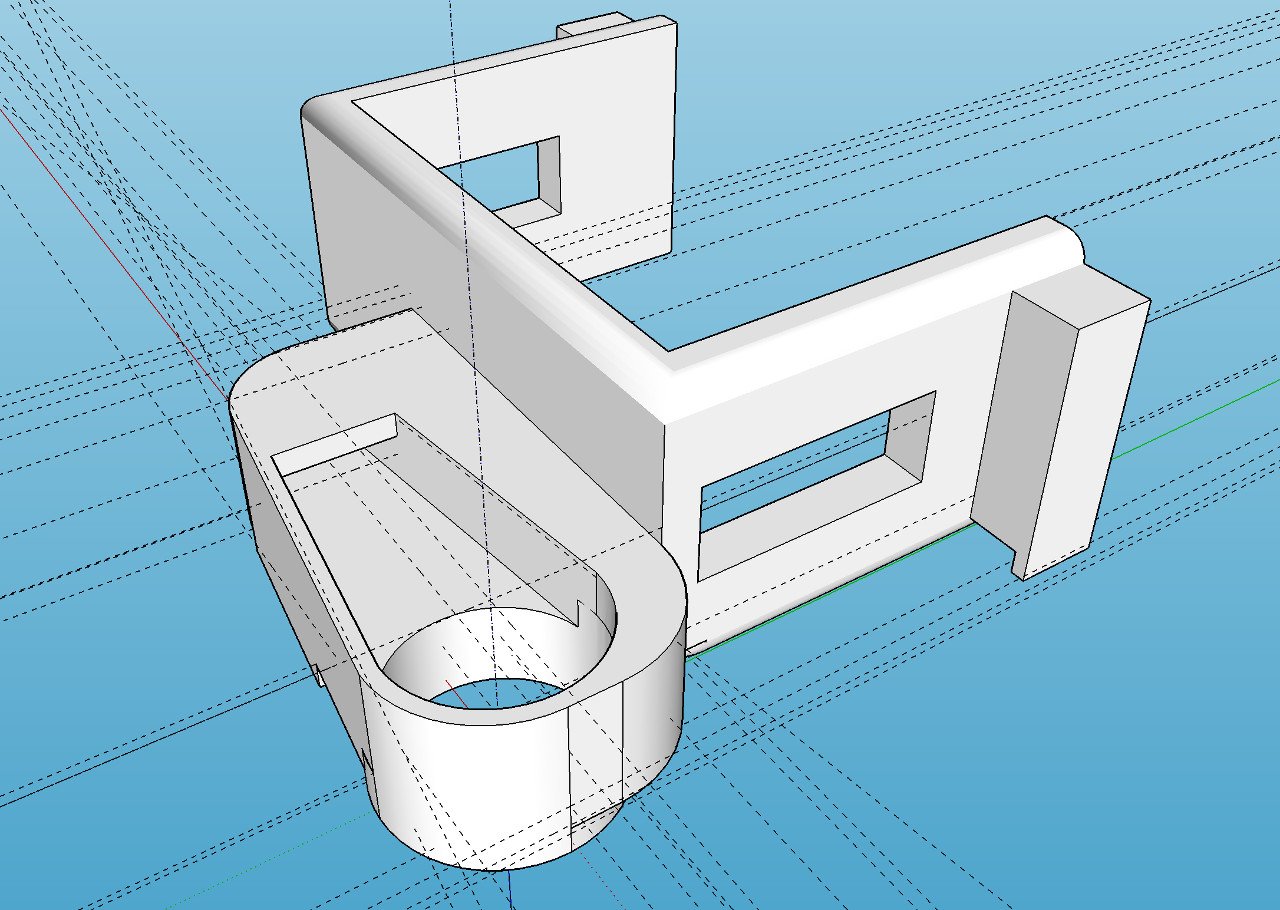 One of such a design decision was the way camera arm is attached to the servos. Idea was that if appropriate retched hole is made, servo shaft would fit and hold. It did to the extend but whole connection was a bit flimsy and would easily slip. Calibrating camera servos and then having the arm slip on the servo shaft would cause even more damage (or add to slipping, rounding the hole even more). The solution for this is to incorporate the original servo arms to the 3D printer parts. The result is here:
One of such a design decision was the way camera arm is attached to the servos. Idea was that if appropriate retched hole is made, servo shaft would fit and hold. It did to the extend but whole connection was a bit flimsy and would easily slip. Calibrating camera servos and then having the arm slip on the servo shaft would cause even more damage (or add to slipping, rounding the hole even more). The solution for this is to incorporate the original servo arms to the 3D printer parts. The result is here:
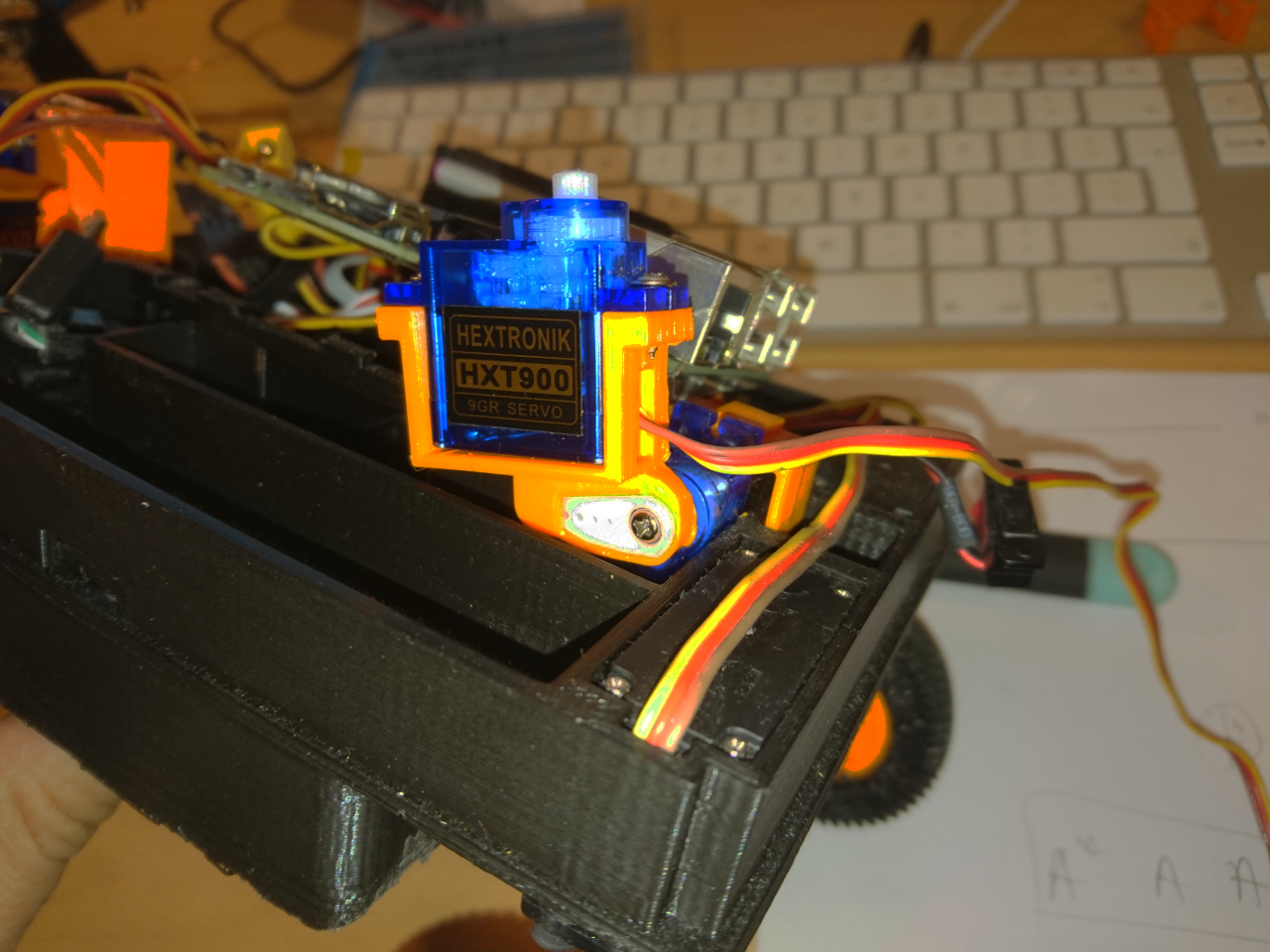 Now we have finally our 'secret' weapon ready to be deployed:
Now we have finally our 'secret' weapon ready to be deployed:
PiNoon
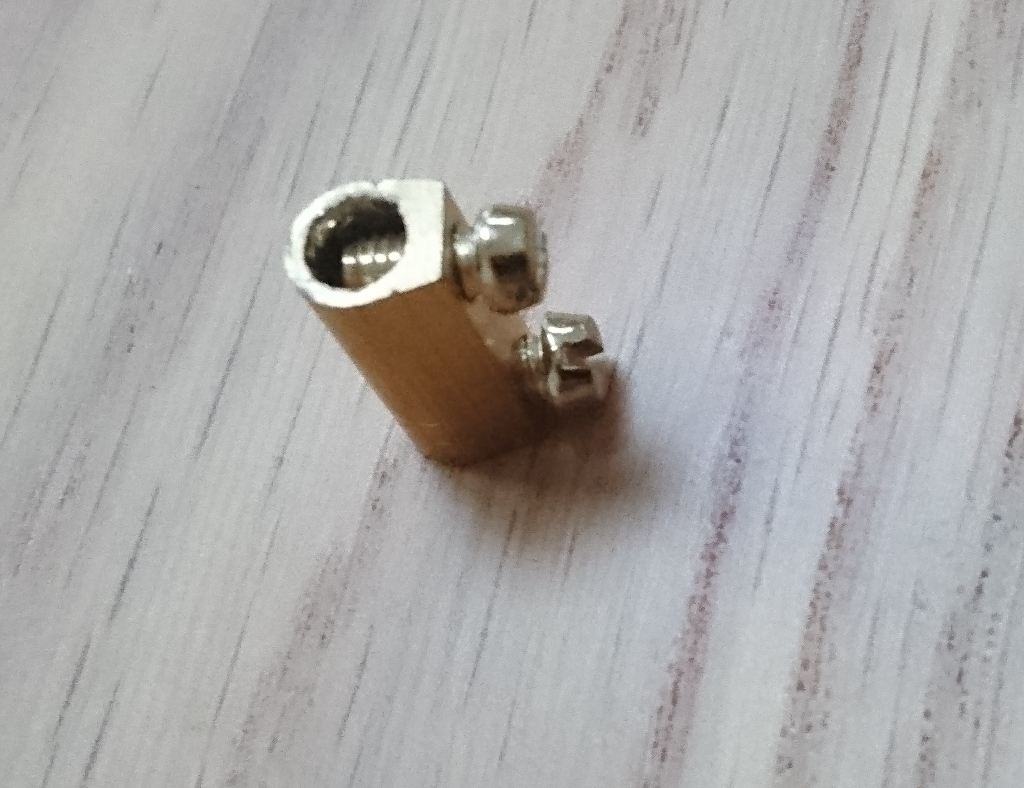
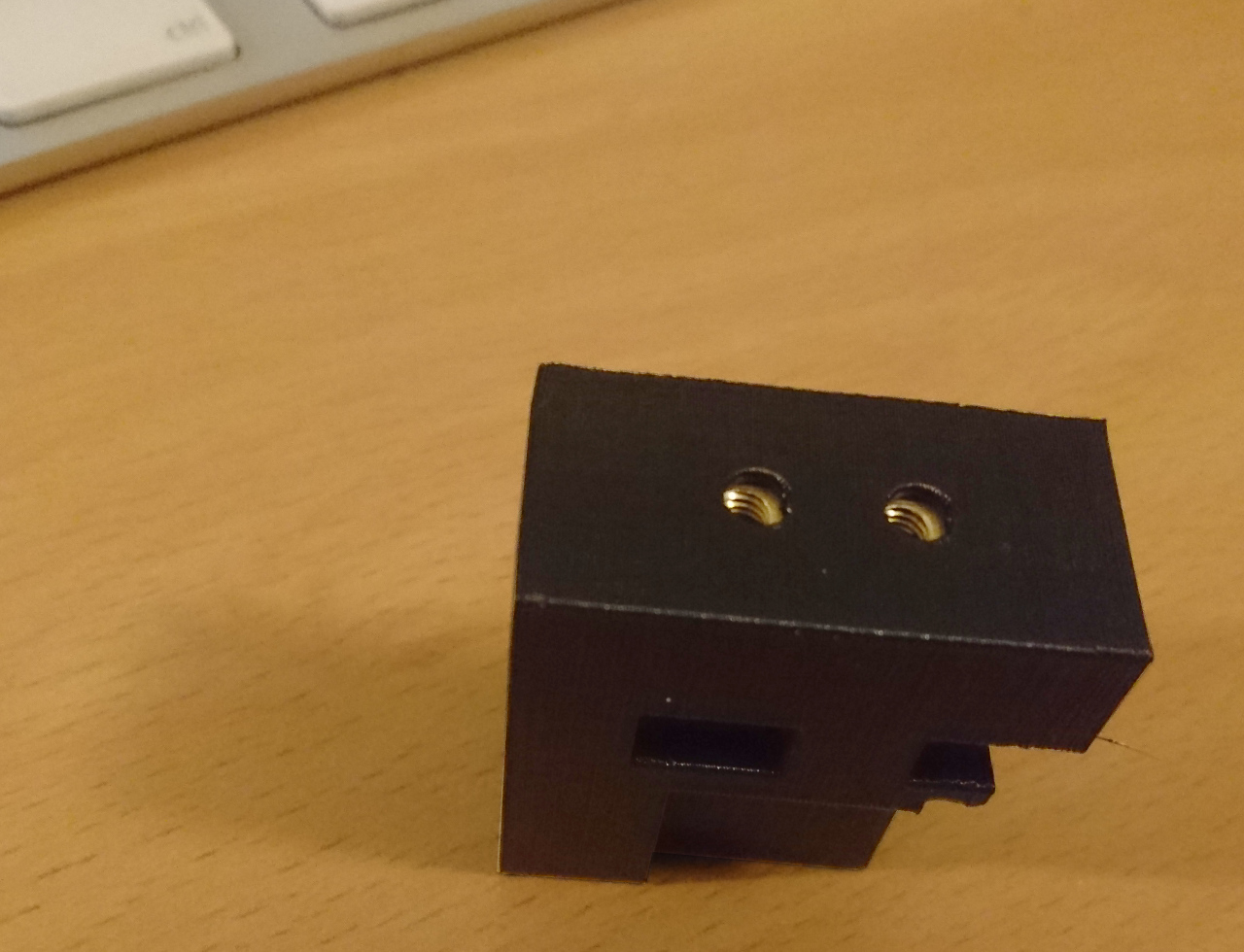
During 2017 competition we had advantage over most of the competitors because of the way the rod with balloons and pin was mounted. It wasn't the simplest solution - it had dual material (ninja flex and pla) 3D prints and plenty of tiny screws. We think it was the second best solution - the best one was the simplest - the humble electric connector.
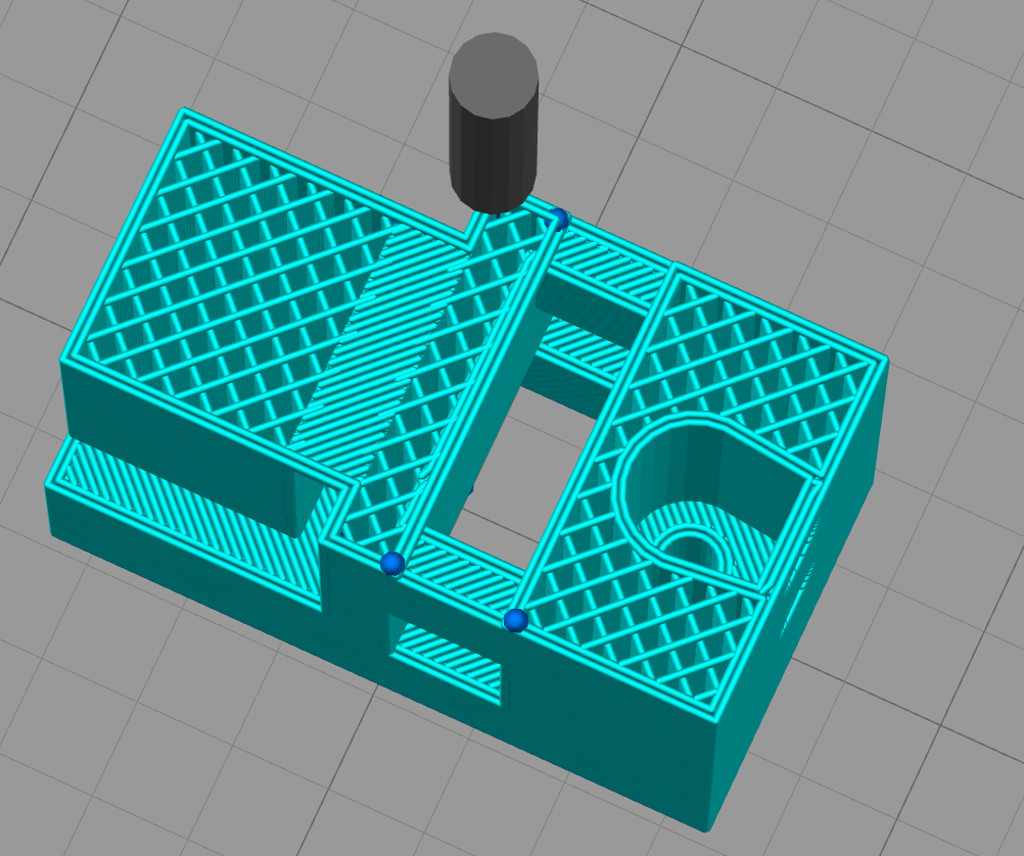
So, in the mean time we returned back to the CAD and incorporated it in our design. Printing was less the trivial as it needed process similar to 'captured nut' where 3D printer needed to stop at particular point for above connector to be inserted:
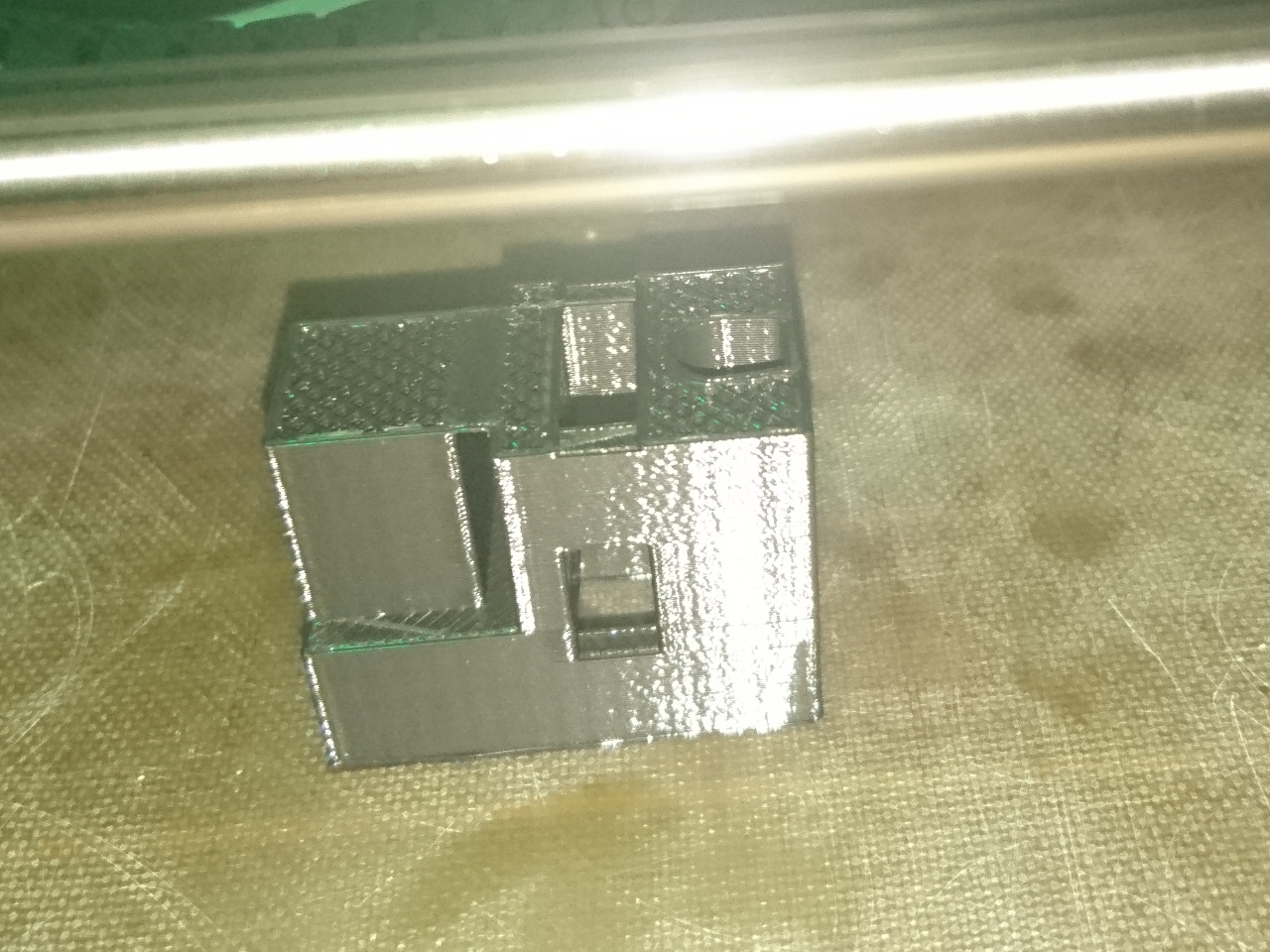
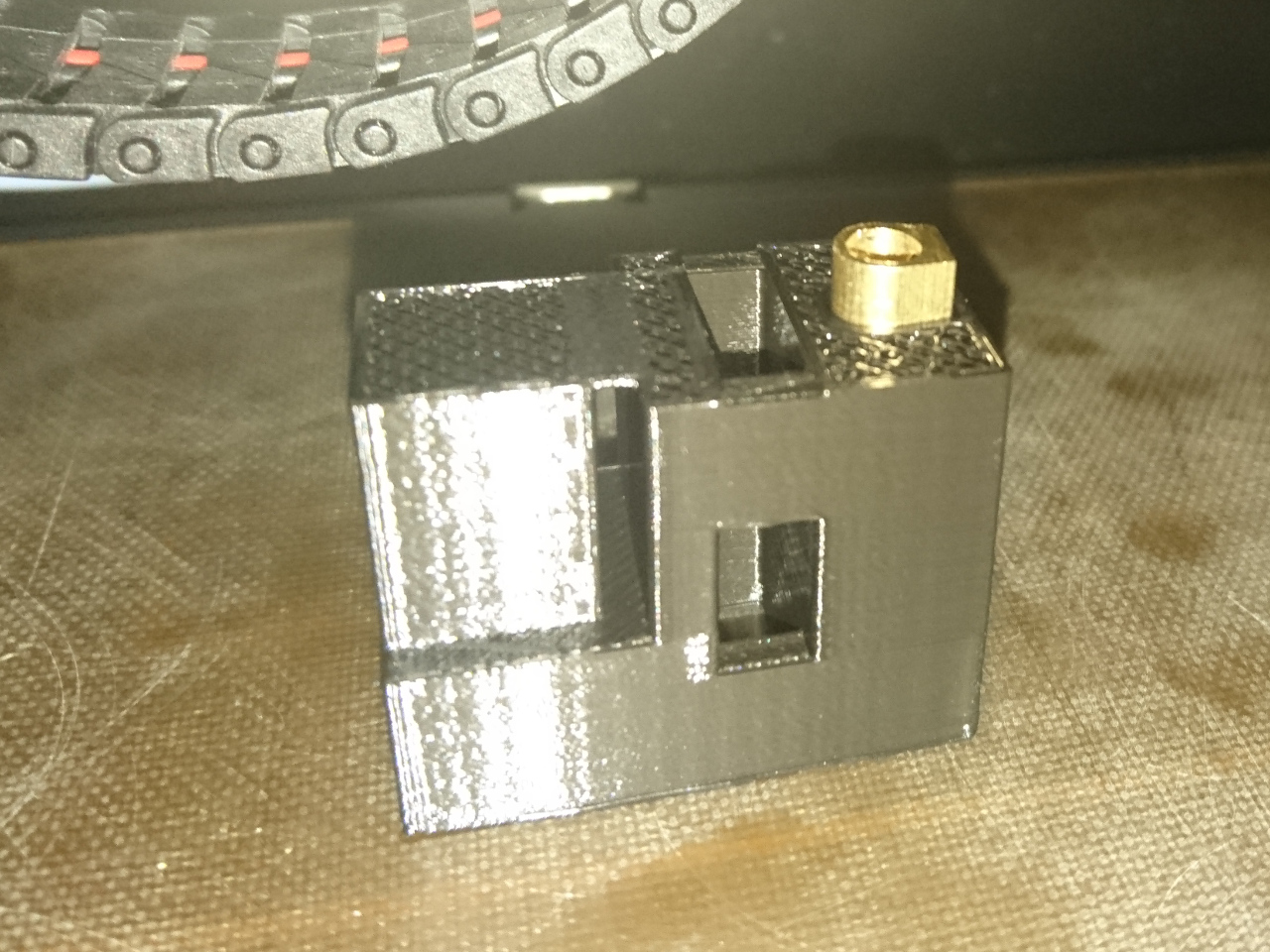
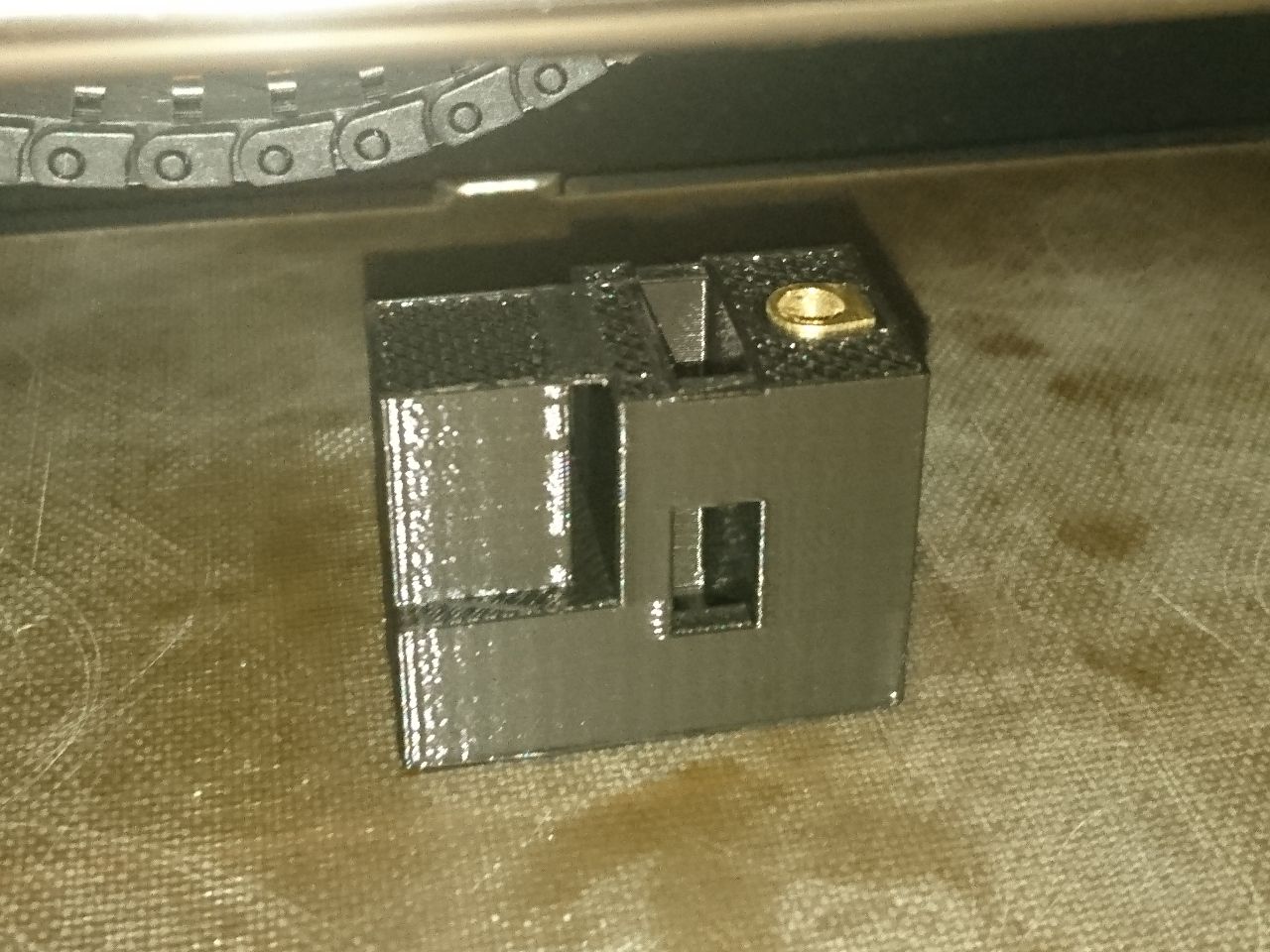
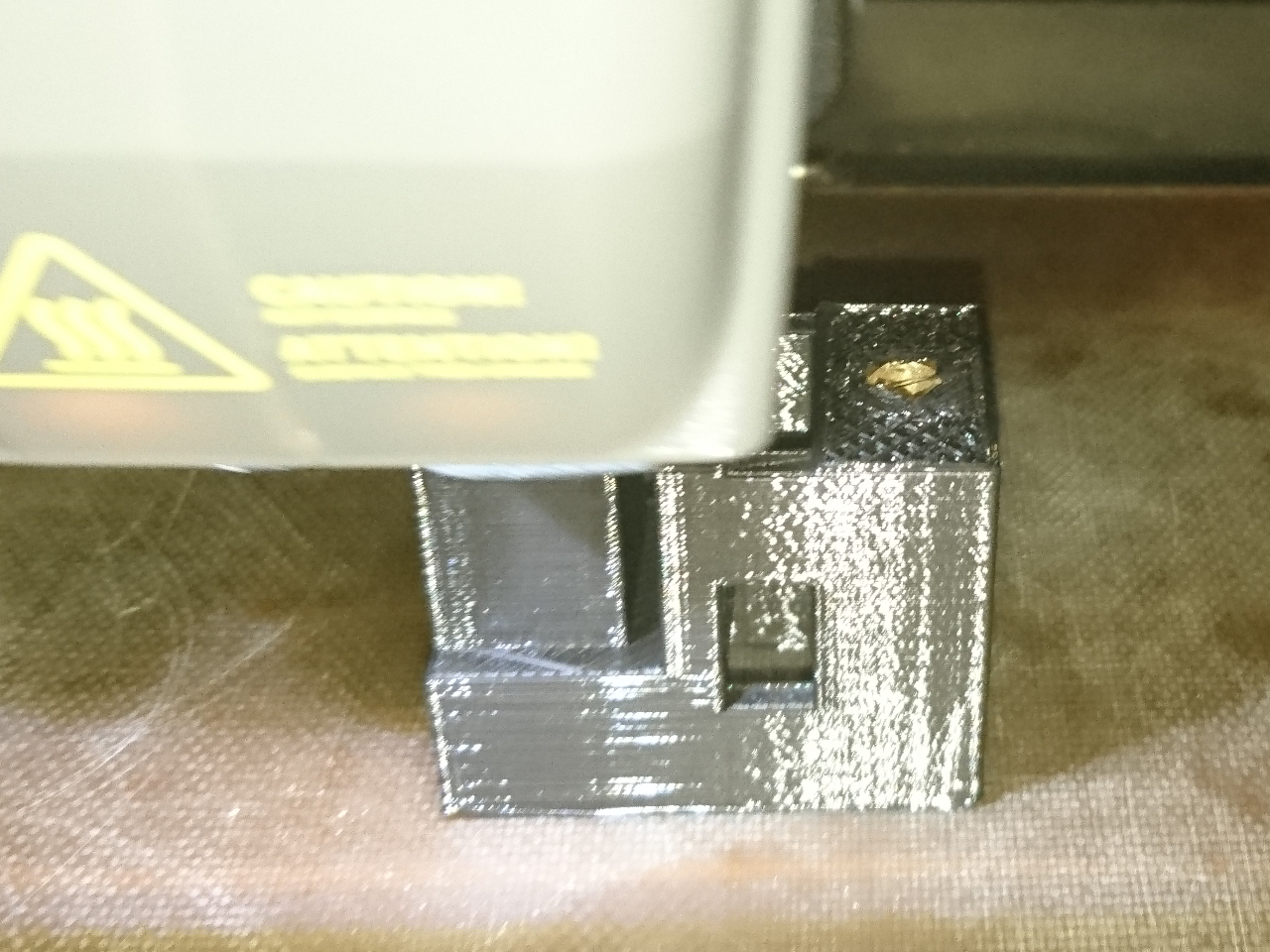
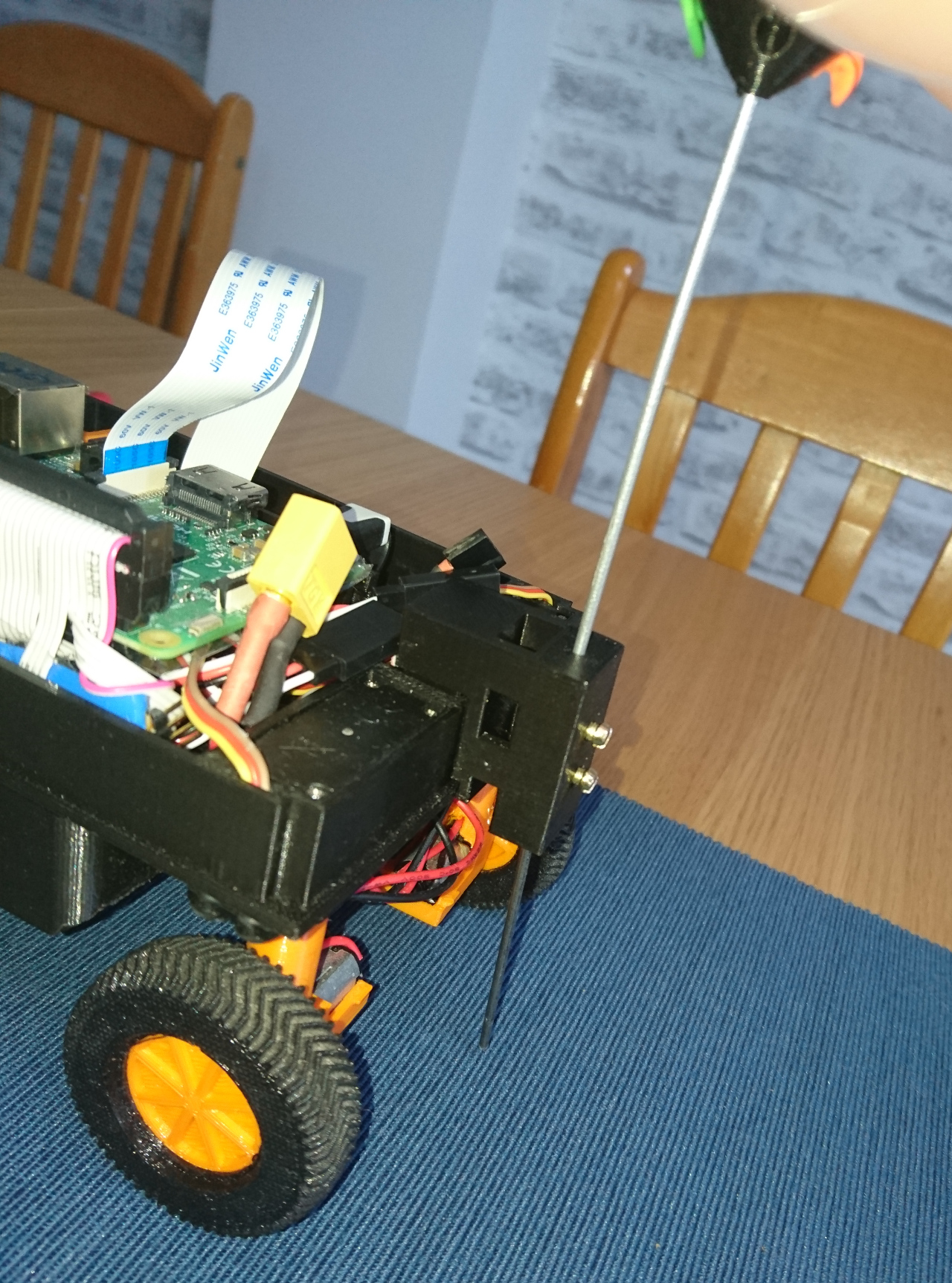
And here are the results: